Adaptive Backstepping Sliding Mode Control for Roll Channel of Launch Vehicle
Arun Kumar V V*, Laila Beebi M
Department of Electrical and Electronics Engineering, TKM College of Engineering, Kollam, India.
*Corresponding Author
Arun Kumar V V,
Department of Electrical and Electronics Engineering,
TKM College of Engineering, Kollam, India.
E-mail: aruntkmiic@gmail.com
Received: July 31, 2015; Accepted: September 03, 2015; Published: September 08, 2015
Citation: Arun Kumar V V, Laila Beebi M (2015) Adaptive Backstepping Sliding Mode Control for Roll Channel of Launch Vehicle. Int J Aeronautics Aerospace Res. 2(5), 58-64. doi: dx.doi.org/10.19070/2470-4415-150007
Copyright: Arun Kumar V V© 2015 This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution and reproduction in any medium, provided the original author and source are credited.
Abstract
This paper presents a comparative study of Backstepping Control, Adaptive Backstepping Control and Adaptive Backstepping Sliding Mode Control on Roll channel of Launch vehicle. Backstepping Control design involves a systematic construction of both feedback control laws and associated Lyapunov functions. The Backstepping design methodology fails in the presence of parameter uncertainties. With Adaptive Backstepping, stabilization is achieved in the presence of unknown parameters. Robustness of Adaptive Backstepping Control can be increased by designing a sliding surface to the associated Lyapunov function. Thus Adaptive Backstepping Sliding Mode Control combines the advantages of both Adaptive Backstepping and Sliding Mode. The comparison of the proposed control schemes is verified by the MATLAB simulation. From the simulation results it is clear that Adaptive Backstepping Sliding Mode Control Scheme gives better and satisfactoryresponses.
2.Introduction
3 Modelling Roll Dynamics
4.Backstepping Control Design
5.Adaptive Backstepping Control Design
6.Adaptive Backstepping Sliding Mode Control Design
7.Simulation Results and Discussions
8.Conclusion
9.References
Keywords
Terms-Backstepping Control (BS); Adaptive Backstepping Control (ABS); Adaptive Backstepping Sliding Mode Control (ABSSM); Launch Vehicle.
Introduction
LAUNCH vehicles are vehicles which are primarily used to carry payloads from the surface of earth to outer space. Launch vehicles are generally classified as: Expendable launch vehicle or Reusable launch vehicle, Orbital launch vehicle or Suborbital launch vehicle, Manned launch vehicle or Unmanned launch vehicle. Expendable launch vehicles are designed for one-time use. They usually separate from their payload and disintegrate during atmospheric re-entry. Reusable launch vehicles are those which can be used more than once, they are designed to perform many missions within their life cycle.
Launch vehicles are highly complex nonlinear systems. Control of launch vehicle using linear control methods reduces the stability of the system since some useful nonlinearities are neglected. Several control techniques, including Proportional-Integral- Derivative (PID) control law with gain scheduling [1], Trajectory Linearization Control (TLC) [2], Adaptive Neural Network (NN) [3], have been developed under Advanced Guidance and Control (AG&C) project and is used for launch vehicle flight control. However, by means of these control techniques the robustness issues were not satisfactory.
Backstepping offers flexibilities which are not present in other nonlinear designs; one of them is that it avoids the cancellation of useful nonlinearities. In [4] backstepping is applied to flight path angle control. Backstepping is recursive method based on Lyapunov theory. In backstepping the parameter uncertainties are assumed to be constant, thus fails in the presence of uncertainties. Adaptive Backstepping [5-8] makes use of dynamic parameter update laws to deal with parametric uncertainties. Moreover the stability of a system may be affected by some bounded disturbances and high rate of adaptation which can be overcome by incorporating a robust control. Sliding Mode control method has strong robustness, especially when the system contains uncertainties. In Adaptive Backstepping Sliding Mode Control design [9], it involves a systematic construction of both feedback control laws and associated Lyapunov functions and the robustness of the controller is increased by incorporating a sliding surface in the parameter updation law.
In this paper Backstepping, Adaptive Backstepping and Adaptive Backstepping Sliding Mode Controls have been implemented on the roll channel to control the roll angle of the launch vehicle. The Adaptive Backstepping control method possesses very good adaptability and Sliding Mode control method has strong robustness, thus Adaptive Backstepping Sliding Mode Control combines the merits of both the controllers. Comparing with Backstepping and Adaptive Backstepping Control methods, the Adaptive Backstepping Sliding Mode Control method has more strong robustness and good adaptability, the effectiveness of the above proposed control schemes is verified by the MATLAB simulation.
The paper has been organized as follows: Section II deals with the modeling of roll dynamics. Section III deals with Backstepping Controller design. Section IV deals with the design of Adaptive Backstepping Control. Section V deals with the design of Adaptive Backstepping Sliding Mode Control. In Section VI the Simulation results are shown with some discussions on it. Section VII is the Conclusion.
Modelling Roll Dynamics
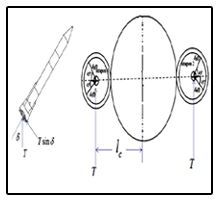
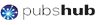
Figure 1. Launch vehicle roll control.
As shown in the figure there are two thrusters. By varying the thruster angle launch vehicle direction in roll channel is controlled. The tilting force to cause roll is in the direction shown as T sin δ. The total torque is due to thrusts of both the thrusters. Then the torque equation can be written as:
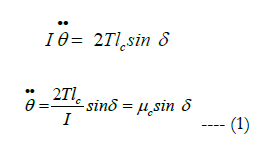
where T = force due to each thruster, lc = length between the main motor and each thruster, δ = thruster angle, I = moment of inertia of the vehicle, θ = roll angle.
Backstepping Control Design
Backstepping is a recursive procedure which breaks a design problem for the full system into sequence of design problems for lower order systems. Backstepping designs by breaking down complex nonlinear systems into smaller subsystems. Then designing control Lyapunov functions and virtual controls for these systems and finally integrating these individual controllers into an actual controller, by stepping back through the subsystem and reassembling it from its component subsystems.
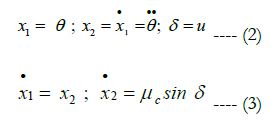
In this paper Backstepping Control is designed for the roll channel control of the system (1). In order to adopt the back stepping control design, the model (1) can be transformed into the following:
A. Step 1
The first subsystem is x•1 = x2. Let the Lyapunov function be
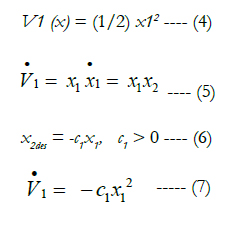
Where the scalar C1 is always greater than zero so that V•1 is always negative definite.
B. Step 2
Error variable,
Adaptive Backstepping Control Design
Adaptive backstepping control is a recursive Lyapunov based nonlinear design method, which makes use of dynamic parameter update laws to deal with parametric uncertainties. For applying adaptive backstepping control design on roll channel of system (1) the equations are modified as:
where Φ = μc is the unknown parameter.
A. Step 1
The first error variable is defined as
Using the Lyapunov function

B. Step 2
The second error variable ξ is defined as:

Thus control law is given by:
Adaptive Backstepping Sliding Mode Control
Design
The Adaptive Backstepping control method possesses very good adaptability but relatively large estimation time and over parameterization are the two disadvantages of Adaptive Backstepping Control. Sliding Mode Control method has strong robustness, which restrains the uncertainty through the design of the sliding surface. Thus Adaptive Backstepping Sliding Mode Control [9] combines the advantages of both Adaptive Backstepping and Sliding Mode Control schemes.
For applying Adaptive Backstepping Sliding Mode Control design on roll channel of system (1) the equations are modified as:
A. Step 1
The first error variable is defined as
Using the Lyapunov function
B. Step 2
The second error variable ξ is defined as:

Thus control law is given by:

Simulation Results and Discussions
Figure.2 shows the regulation of the roll angle using BS for different values of C1 and C2, with an initial condition of 20 degree. Figure. 3 shows the variation of roll rate with time for the same initial condition. Figure.4 shows the tracking of roll angle. Figure.5 shows the regulation of roll angle using ABS with 20 degree initial condition and for different values of C1 and C2. As the value of C1 and C2 is increased the settling time decreases but for each case there is a small overshoot. Figure.6 shows the variation of roll angle for different values of C1 and C2. Figure.7 shows the tracking of roll angle using ABS. Figure.8 shows the regulation of roll angle using ABSSM with 20 degree initial condition and for different values of C1, C2 and K1. As the value of constants is increased the settling time decreases without any overshoot. Figure.9 shows the regulation of roll rate using ABSSM. Figure.10 shows the tracking of roll angle using ABSSM. Figure.11 shows the comparison of regulation of roll angle using all the three controllers with C1=C2=1. Figure12 shows the comparison of regulation of roll rate using all the three controllers with C1 = C2 =1. Figure 13 shows the comparison of tracking of roll angle using all the three controllers with C1=C2=1. Figure 14 shows the disturbance analysis of the three controllers when they are subjected to a disturbance of 10 degree. From the simulation results, it is clear that the Adaptive Backstepping Sliding Mode Controller gives a better response than others.
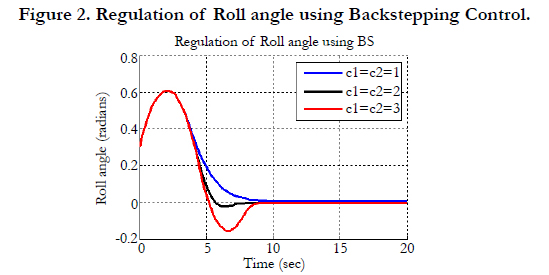
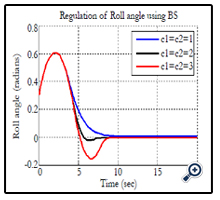
Figure 2. Regulation of Roll angle using Backstepping Control.
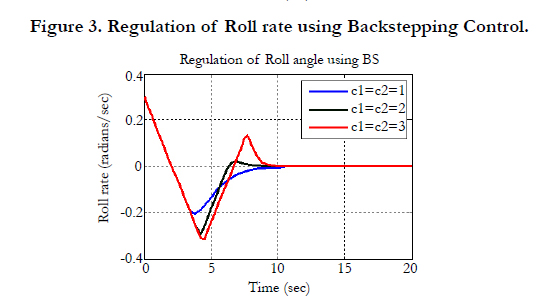
Figure 3. Regulation of Roll rate using Backstepping Control.
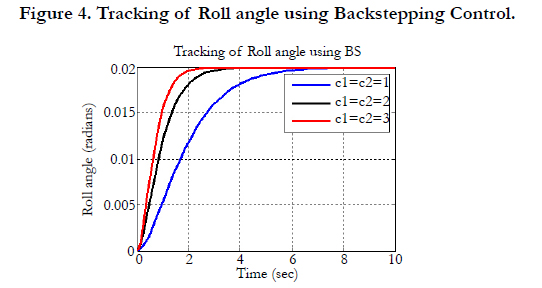
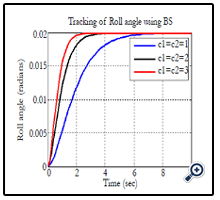
Figure 4. Tracking of Roll angle using Backstepping Control.
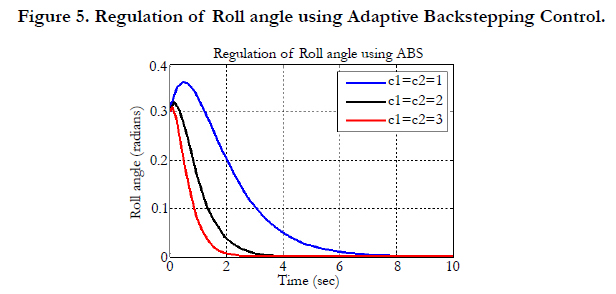
Figure 5. Regulation of Roll angle using Adaptive Backstepping Control.
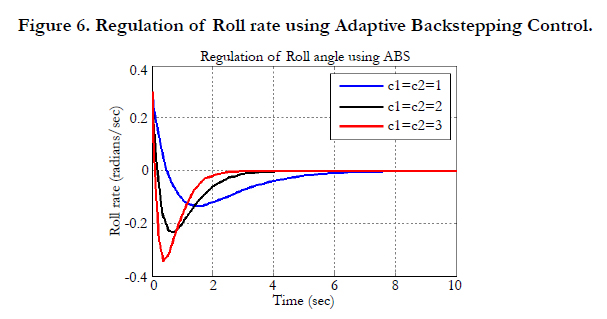
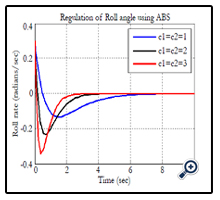
Figure 6. Regulation of Roll rate using Adaptive Backstepping Control.
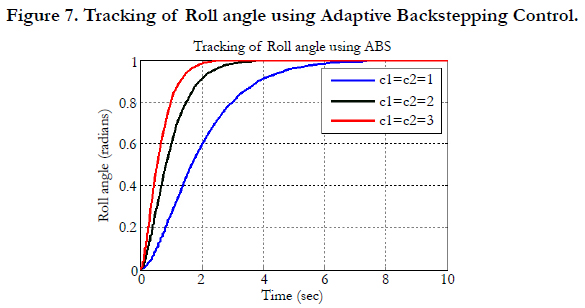
Figure 7. Tracking of Roll angle using Adaptive Backstepping Control.
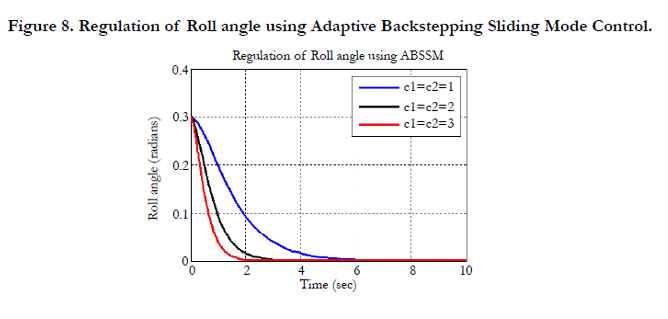
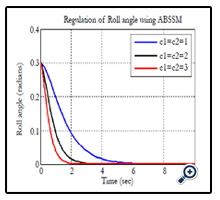
Figure 8. Regulation of Roll angle using Adaptive Backstepping Sliding Mode Control.
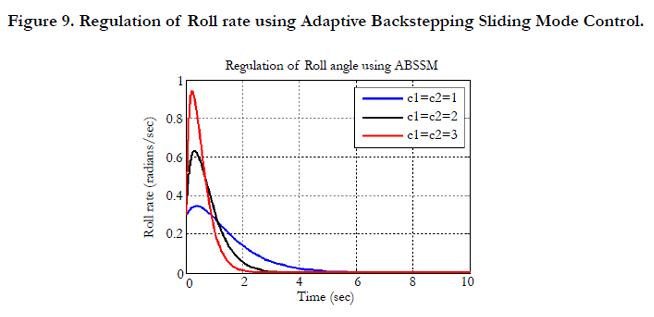
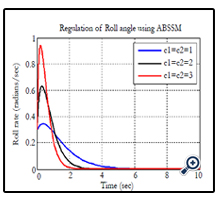
Figure 9. Regulation of Roll rate using Adaptive Backstepping Sliding Mode Control.
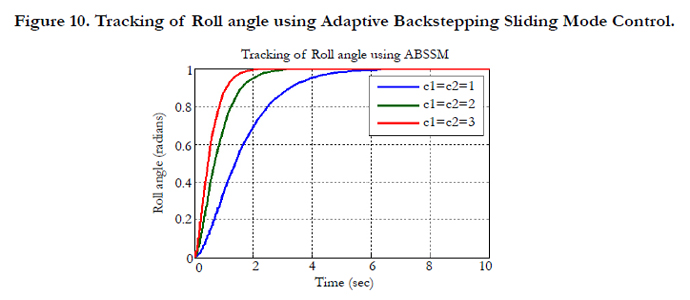
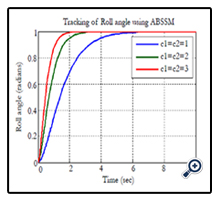
Figure 10. Tracking of Roll angle using Adaptive Backstepping Sliding Mode Control.
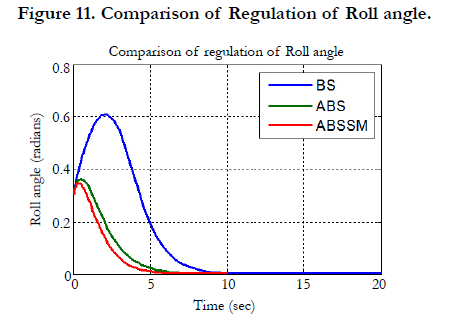
Figure 11. Comparison of Regulation of Roll angle.
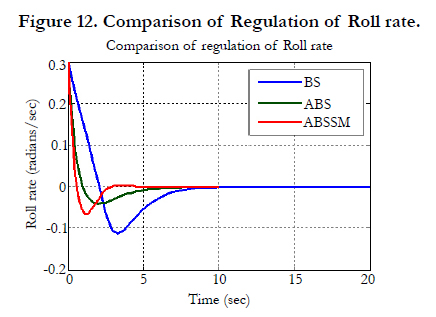
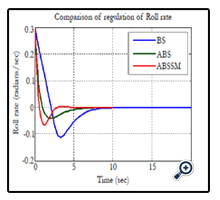
Figure 12. Comparison of Regulation of Roll rate.
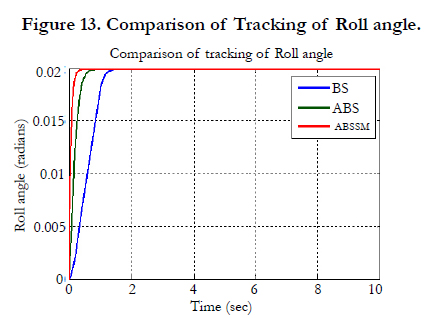
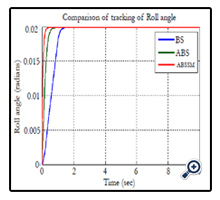
Figure 13. Comparison of Tracking of Roll angle.
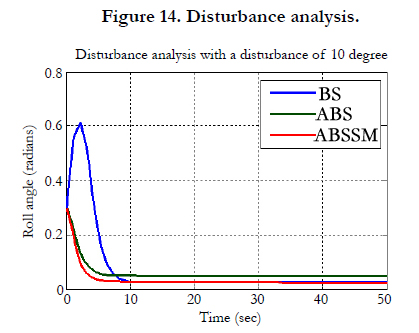
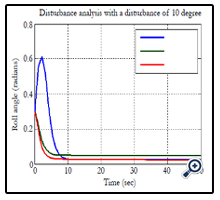
Figure 14. Disturbance analysis.
Conclusion
In this paper Backstepping, Adaptive Backstepping and Adaptive Backstepping Sliding Mode Control have been designed for the roll channel of launch vehicle. While designing Backstepping non linearities affecting the system were taken as constant where as in Adaptive Backstepping design uncertainties associated with the system is considered. Simulation results shows that Adaptive Backstepping Sliding Mode design gives comparatively better and satisfactory responses of the three controllers. Thus Adaptive Backstepping Sliding Mode Controllers displays strong robustness and adaptability.
References
- Hall CE, Hodel AS, Hung JY (1999) Variable structure PID control to prevent integral windup, in: Proceedings of the IEEE 31st Southeastern Symposium on System Theory.169-173.
- Zhu J, Hodel AS, Funston K, Hall CE (2001) X-33 entry flight controller design by trajectory linearization—a singular perturbation approach, in: Proceedings of American Astronautical Society Guidance and Control Conference, Breckenridge, Colorado. 151-170.
- Johnson EN, Calise AJ, El-Shirbiny H (2000) Feedback linearization with neural network augmentation applied to X-33 attitude control, in: Proceedings of AIAA Guidance, Navigation and Control Conference.
- Harkegard O, Glad ST (2000) A backstepping design for flight path angle control. Proceedings of the 39th IEEE Conference on Decision and Control, Sidney, Australia. 3570-3575.
- Kristic M, Kanellakopoulos I, Kokotovic P (1995) Nonlinear and adaptive control design. John Wiley and sons, United States of America.
- Ebrahim A, Murphy GV (2005) Adaptive Backstepping Controller Design of an Inverted Pendulum, Proceedings of IEEE Thirty-Seventh Southeastern Symposium on System Theory. 172-174.
- Lian BH, Bang H, Hurtado JE (2004) Adaptive Backstepping Control based Autopilot design for Reentry Vehicle, in proceedings of AIAA Guidance, Navigation and Control Conference, Providence, Rhode Island. 16-19.
- Ashima CR, Ushakumari S, Geetha S (2014) Application of adaptive backstepping for the control of a Reusable Launch Vehicle, National conference on technological trends.
- Yi LK, Zhao J, Ma D (2007) Adaptive Backstepping Sliding Mode Nonlinear Control for Buck DC/DC Switched Power Converter, IEEE International Conference on Control and Automation, Guangzhou, China. 1198-1201.